#include <ContactModel_impl.h>
Public Types | |
| typedef Array< T > | TArray |
| typedef Array< int > | IntArray |
| typedef Vector< T, 3 > | VectorT3 |
| typedef Vector< double, 3 > | VectorD3 |
| typedef Array< VectorT3 > | VectorT3Array |
Public Member Functions | |
| Impl (const GeomFields &geomFields, ContactFields &contactFields, const MeshList &meshes) | |
| void | init () |
| ContactModelConstants< T > & | getConstants () |
| void | computeSolidSurfaceForce (const StorageSite &solidFaces, bool perUnitArea) |
Private Attributes | |
| const MeshList | _meshes |
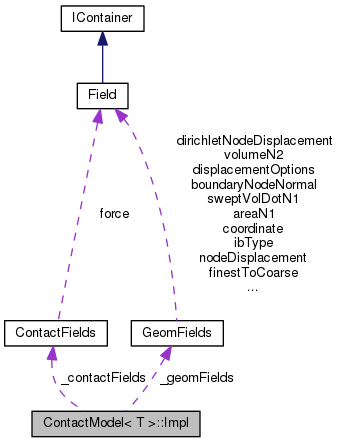
| const GeomFields & | _geomFields |
| ContactFields & | _contactFields |
| ContactModelConstants< T > | _constants |
Detailed Description
template<class T>
class ContactModel< T >::Impl
Definition at line 17 of file ContactModel_impl.h.
Member Typedef Documentation
| typedef Array<int> ContactModel< T >::Impl::IntArray |
Definition at line 22 of file ContactModel_impl.h.
| typedef Array<T> ContactModel< T >::Impl::TArray |
Definition at line 21 of file ContactModel_impl.h.
| typedef Vector<double, 3> ContactModel< T >::Impl::VectorD3 |
Definition at line 24 of file ContactModel_impl.h.
| typedef Vector<T,3> ContactModel< T >::Impl::VectorT3 |
Definition at line 23 of file ContactModel_impl.h.
| typedef Array<VectorT3> ContactModel< T >::Impl::VectorT3Array |
Definition at line 25 of file ContactModel_impl.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 28 of file ContactModel_impl.h.
Member Function Documentation
|
inline |
Definition at line 41 of file ContactModel_impl.h.
References StorageSite::getCount(), and Array< T >::zero().
|
inline |
Definition at line 39 of file ContactModel_impl.h.
|
inline |
Definition at line 36 of file ContactModel_impl.h.
Member Data Documentation
|
private |
Definition at line 156 of file ContactModel_impl.h.
|
private |
Definition at line 155 of file ContactModel_impl.h.
|
private |
Definition at line 154 of file ContactModel_impl.h.
|
private |
Definition at line 153 of file ContactModel_impl.h.
The documentation for this class was generated from the following file:
