#include <Grid.h>
Public Member Functions | |
| Grid (GeomFields &geomFields, FlowFields &flowFields, string coordFileName, string velocityFileName) | |
| ~Grid () | |
| const shared_ptr< Array< VecD3 > > & | getCoordinates () |
| const shared_ptr< Array< VecD3 > > & | getVelocities () |
| const StorageSite & | getNodes () |
| const StorageSite & | getCells () |
| void | setandwriteGrids (const string fileBase) |
| void | createCellToNodeConnectivity () |
| void | setConnFaceToGrid (Mesh &mesh, const StorageSite &faces) |
| vector< int > | findNeighbors (const VecD3 &point) |
| !! only applicable for rectangular mesh More... | |
| const shared_ptr< CRConnectivity > | createConnectivity (const StorageSite &pointSite, const VecD3Array &points) |
| shared_ptr< ArrayBase > | computeInterpolatedVelocity (const StorageSite &faces) |
| vector< int > | findNeighborsByCells (const VecD3 &point) |
Protected Attributes | |
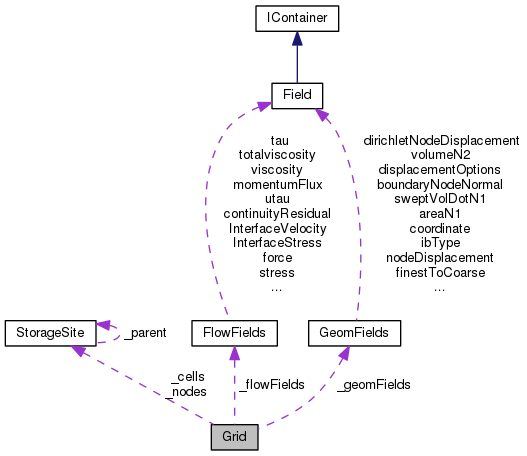
| GeomFields & | _geomFields |
| FlowFields & | _flowFields |
| StorageSite | _nodes |
| StorageSite | _cells |
| shared_ptr< Array< VecD3 > > | _coordinates |
| shared_ptr< Array< VecD3 > > | _velocities |
| shared_ptr< CRConnectivity > | _cellNodes |
Detailed Description
Constructor & Destructor Documentation
| Grid::Grid | ( | GeomFields & | geomFields, |
| FlowFields & | flowFields, | ||
| string | coordFileName, | ||
| string | velocityFileName | ||
| ) |
Definition at line 33 of file Grid.cpp.
References _coordinates, _nodes, _velocities, Field::addArray(), GeomFields::coordinate, createCellToNodeConnectivity(), findNeighborsByCells(), StorageSite::getCount(), readVectors(), StorageSite::setCount(), and FlowFields::velocity.
Member Function Documentation
| shared_ptr< ArrayBase > Grid::computeInterpolatedVelocity | ( | const StorageSite & | faces | ) |
Definition at line 411 of file Grid.cpp.
References _geomFields, GeomFields::_interpolationMatrices, _nodes, _velocities, and StorageSite::getCount().
| void Grid::createCellToNodeConnectivity | ( | ) |
Definition at line 151 of file Grid.cpp.
References _cellNodes, _cells, _nodes, and StorageSite::setCount().
Referenced by Grid().
| const shared_ptr< CRConnectivity > Grid::createConnectivity | ( | const StorageSite & | pointSite, |
| const VecD3Array & | points | ||
| ) |
Definition at line 363 of file Grid.cpp.
References _nodes, findNeighborsByCells(), and StorageSite::getCount().
Referenced by setConnFaceToGrid().
| vector< int > Grid::findNeighbors | ( | const VecD3 & | point | ) |
!! only applicable for rectangular mesh
Definition at line 291 of file Grid.cpp.
References _coordinates, and Array< T >::getLength().
| vector< int > Grid::findNeighborsByCells | ( | const VecD3 & | point | ) |
Definition at line 209 of file Grid.cpp.
References _cellNodes, _cells, _coordinates, dot(), StorageSite::getCount(), CRConnectivity::getCount(), and mag().
Referenced by createConnectivity(), and Grid().
|
inline |
|
inline |
| void Grid::setConnFaceToGrid | ( | Mesh & | mesh, |
| const StorageSite & | faces | ||
| ) |
Definition at line 397 of file Grid.cpp.
References _geomFields, _nodes, GeomFields::coordinate, createConnectivity(), and Mesh::setConnectivity().
Member Data Documentation
|
protected |
Definition at line 66 of file Grid.h.
Referenced by createCellToNodeConnectivity(), and findNeighborsByCells().
|
protected |
Definition at line 63 of file Grid.h.
Referenced by createCellToNodeConnectivity(), findNeighborsByCells(), and getCells().
Definition at line 64 of file Grid.h.
Referenced by findNeighbors(), findNeighborsByCells(), getCoordinates(), and Grid().
|
protected |
|
protected |
Definition at line 60 of file Grid.h.
Referenced by computeInterpolatedVelocity(), and setConnFaceToGrid().
|
protected |
Definition at line 62 of file Grid.h.
Referenced by computeInterpolatedVelocity(), createCellToNodeConnectivity(), createConnectivity(), getNodes(), Grid(), and setConnFaceToGrid().
Definition at line 65 of file Grid.h.
Referenced by computeInterpolatedVelocity(), getVelocities(), and Grid().
The documentation for this class was generated from the following files:
